ABSTRACT
This paper introduces a new Open Source Java library suited for the simulation of embedded control systems. The library is based on the ideas and architecture of TrueTime, a toolbox of Matlab devoted to this topic, and allows Java programmers to simulate the performance of control processes which run in a real time environment. Such simulations can improve considerably the learning and design of multitasking real-time systems.
The choice of Java increases considerably the usability of our library, because many educators program already in this language. But also because the library can be easily used by Easy Java Simulations (EJS), a popular modeling and authoring tool that is increasingly used in the field of Control Education. EJS allows instructors, students, and researchers with less programming capabilities to create advanced interactive simulations in Java. The paper describes the ideas, implementation, and sample use of the new library both for pure Java programmers and for EJS users. The JTT library and some examples are online available.
EMBEDDED CONTROL SYSTEMS
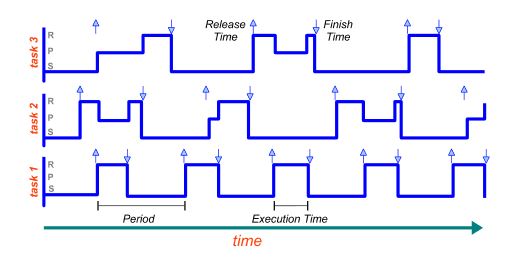
Figure 2. Schedule plot: three periodic tasks are running on the same CPU
Under a scheduling policy tasks may be in one of the three following states: running, preempted or blocked and sleeping. Running means that the task is actually executing. Preempted means that the task needs to be executed, but it is not being executed because another task is running (usually one with higher priority). Sleeping indicates that the task has finished and is waiting for its next release time. A schedule plot such as the one shown in Figure 2 is a graphical used to illustrate the evolution of the states of the tasks in time.
SIMULATING AN EMBEDDED CONTROL SYSTEM
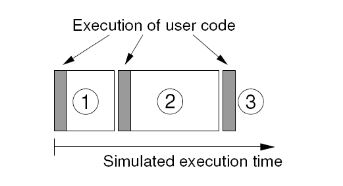
Figure 3. TrueTime code model. The execution of task code (or user code) is modelled by a sequence
Inspired by the successful ideas and architecture of the TrueTime toolbox for Matlab, we created our JTT Java library to simulate code execution and scheduling of tasks in a real time environment. The library allows converting a Java simulation of a control process into an embedded control system by defining one or several kernels (which simulates a computer) that execute tasks according with a given scheduling policy, including RM and EDF. Similar to TrueTime, the code of a task is divided into segments as shown in Figure 3.
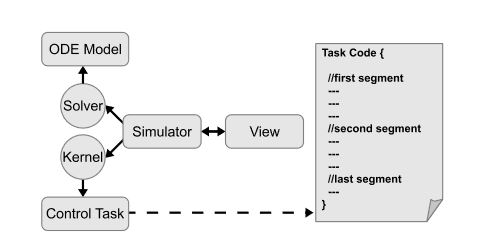
Figure 5. Diagram of an embedded control system simulation with JTT
The coordination of both elements, kernel and solver, can be easily done by a simulator just executing repeatedly the ODE solver and the kernel at specific times, see Figure 5. When both solver and kernel are executed by the simulator, they internally set their next time to be called by the simulator. In the case of the solver this next invocation time is the next integration step determined by the algorithm that implements the solver.
JAVA-JTT APPROACH
In this section we present a virtual lab of an embedded control system. First, the model of a DC servo motor is presented. Then, the Java code to simulate the system is commented. The objective of this virtual lab is just to show how to create the simulations of embedded control systems using Java and the JTT library.
EJS-JTT APPROACH
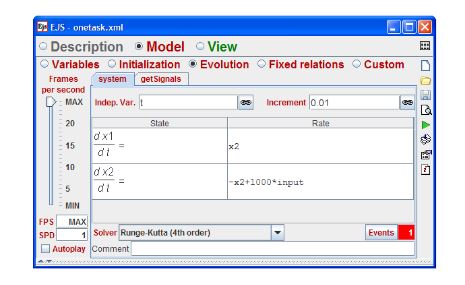
Figure 6. Ordinary differential equations of the model system using the editor of EJS. The ODE models are defined in the section Evolution in EJS
Regarding to the solver and the plant dynamics, EJS provides an ODE editor to describe the ODE model given by (see Figure 6). There are many solvers available in EJS, including the Runge-Kutta algorithm commented previously in Section 3. EJS has also a way to detect events using the method of bisection. This feature will be useful in our case for detection of scheduling events.
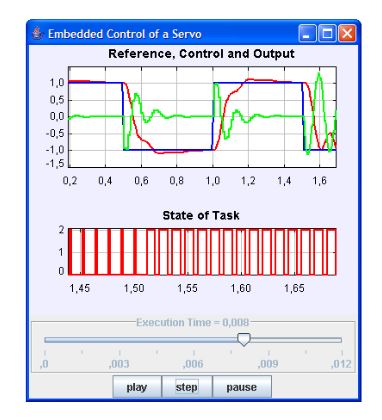
Figure 8. GUI of the virtual lab developed using the JTT-EJS approach
The GUI of the simulation is shown in Figure 8. The virtual lab has two plots. Upper plot shows the signals reference, control and output of the system. Bottom plot, presents the schedule data of the task. There is also a slider to control the execution time and three buttons to control the simulation. In the GUI we can see how the increasing of execution time of the controller affects negatively to the control performance.
CONCLUSIONS AND FURTHER WORK
Control theory and real-time systems have both a long, but separated, tradition. Typically, an embedded control system have been implemented in two unconnected phases by two kind of engineers: a control engineer and a computer engineer. Both engineers have made wrong assumptions about each phase. Computation delay of the controller is negligible or controller deadlines are always critical, are wrongly assumed as true. This misunderstanding have required of new simulation tools to study the real-time control systems.
One of them is the successful Matlab-based toolbox TrueTime. However the toolbox is limited to Matlab users, which can be an important restriction for many students. For that reason, we have created a library called JTT, which have been implemented in Java to take advantages of this language specially from the pedagogical point of view. Interactivity and rich graphical contents can be also added to these simulations in order to help specially to the learning process of embedded control systems.
Non-programming instructors, who are not use to Java, can still build simulations by using the JTT library with Easy Java Simulations. This approach facilitates enormously the creation of simulations with a high degree of interactivity and visualization.To show how to use the library JTT, three virtual labs have been presented in the article, one built completely in Java, and the others two by using Easy Java Simulations. Some important effects, about the real-time parameters in the embedded control systems are also discussed in that simulations.
Source: Murcia University
Authors: Gonzalo Farias | Anton Cervin | Karl-Erik Arzen | Sebastian Dormido | Francisco Esquembre
>> More Matlab Projects on Signals and Systems for Final Year Students
>> 200+ Matlab Projects for Control System for Final Year Students
>> More Matlab Projects on Embedded Systems for Engineering Students
>> Simple Java Projects with Source Code Free Download and Documentation