ABSTRACT
This paper presents a new vehicle classification and develops a traffic monitoring detector to provide reliable vehicle classification to aid traffic management systems. The basic principle of this approach is based on measuring the dynamic strain caused by vehicles across pavement to obtain the corresponding vehicle parameters–wheelbase and number of axles–to then accurately classify the vehicle.
A system prototype with five embedded strain sensors was developed to validate the accuracy and effectiveness of the classification method. According to the special arrangement of the sensors and the different time a vehicle arrived at the sensors one can estimate the vehicle’s speed accurately, corresponding to the estimated vehicle wheelbase and number of axles. Because of measurement errors and vehicle characteristics, there is a lot of overlap between vehicle wheelbase patterns.
Therefore, directly setting up a fixed threshold for vehicle classification often leads to low-accuracy results. Using the machine learning pattern recognition method to deal with this problem is believed as one of the most effective tools. In this study, support vector machines (SVMs) were used to integrate the classification features extracted from the strain sensors to automatically classify vehicles into five types, ranging from small vehicles to combination trucks, along the lines of the Federal Highway Administration vehicle classification guide.
Test bench and field experiments will be introduced in this paper. Two support vector machines classification algorithms (one-against-all, one-against-one) are used to classify single sensor data and multiple sensor combination data. Comparison of the two classification method results shows that the classification accuracy is very close using single data or multiple data. Our results indicate that using multi-class SVM-based fusion multiple sensor data significantly improves the results of a single sensor data, which is trained on the whole multi-sensor data set.
INSTRUMENTAL PAVEMENT TEST BENCH AND STRAIN-VEHICLE DATABASE
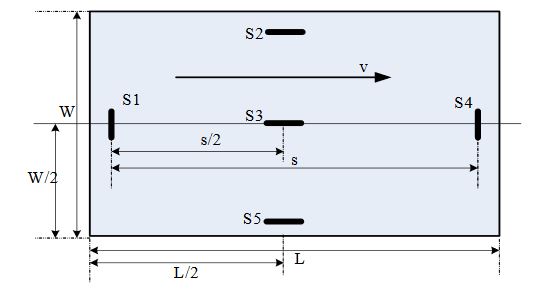
Figure 1 .The layout plan of the strain gauge sensors
The testing bench includes five embedded concrete strain gauge sensors located symmetrically below the surface of the pavement slab (Figure 1), us ed to measure the rigid pavement strain response. In this figure W =4.50 m is the pavement slab width; L =4.6 m is the pavement slab length; v is the direction of traffic; sensors S 1, S2, S4, S5 are 25 cm under the edge of pavement; s=4.1 m is the distance between S1 and S4.
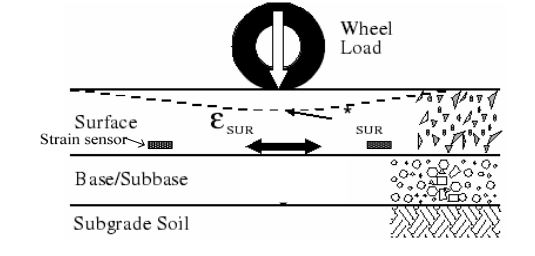
Figure 3. Illustration of the strain caused by moving wheel loads
Strain sensors measure the expansion and contraction of pavement material due to mechanical stress. Like all transducers, these sensors rely on indirect measurement for determining strains. The strain gauge is embedded into the pavement surface (refer to Figure 3). Then, the strain εSUR experienced by the pavement is transferred directly to the gauge, which responds with a linear change in electrical resistance.
PRELIMINARY EXPERIMENTS
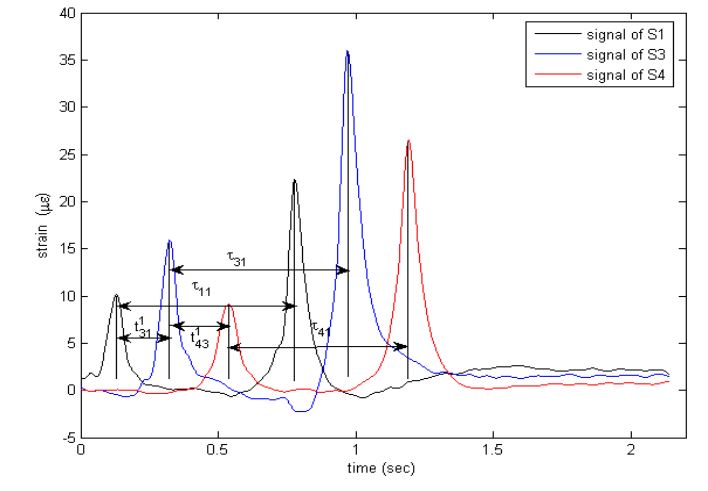
Figure 7. Vehicle classification using multiple embedded strain gauge sensors
To get other vehicle parameters, an accurate speed should be measured first. Figure 7 shows the real response curves of sensors S1, S3, S4 when a 2-axle truck crosses them. A Matlab program is applied to each strain time history to automatically identify the basic parameters: N (Number of peak each curve) corresponding to number of axle, v (speed of vehicle passing over sensor), WB (distance between adjacent axle).
DESCRIPTION OF SVM FUSION CLASSIFICATION
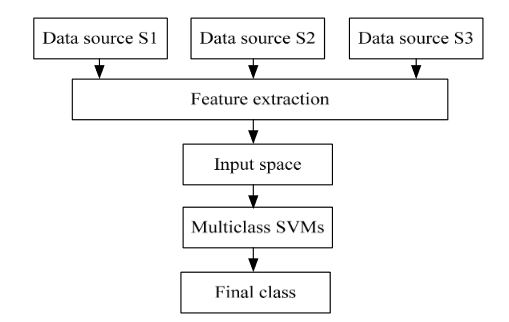
Figure 9. Data fusion architecture Scheme A
The fusion schemes make full use of multiclass SVMs characteristic. The centralized fusion scheme is illustrated as the fusion Scheme A. the distributed fusion schemes is illustrated as the fusion Scheme B. In fusion Scheme A (see Figure 9), the features of all the sensor data sources are extracted and combined to form a single input space. Then the multiclass SVMs is trained and tested to create a decision maker.
EXPERIMENTAL RESULTS
Since freeways carry large volumes of vehicles, our data collection was installed on freeways to increase a possibility of having many vehicle types in the dataset, whilst using multiple strain gauge sensors for the measurements, thereby improving the accuracy of the classification parameters. Data from five strain gauge sensors were collected in situ when a vehicle crossed the instrumental pavement. The panel was adopted as a test bed for periodic continuous monitoring.
CONCLUSIONS
A novel vehicle classification technique has been developed based on multiple pavement strains caused by moving traffic loads. Pavement strains are often used for monitoring the health of the road structure; here we regard it as a method of classification of vehicles. The main advantages of vehicle classification based on pavement strain are as follows: firstly, due to the installation of strain gauge sensors underneath the pavement, the sensor will not be affected by the impact load and has better durability;
secondly, sensors would not be affected by bad weather; thirdly, the system may monitor day and night, especially at night so overloaded vehicles cannot escape monitoring; fourthly, since sensors are low-cost, it can provide a cheaper vehicle classification. It is an invasive measurement method, often installed my modifying the road, which is its main drawback. A prototype system for measurement of pavement strain induced by moving vehicle traffic was developed and built to collect data for verifying and testing the feasibility and performance of the system.
The estimation of the speed is very important, as it often affects the accuracy of the estimated vehicle wheelbase. In this research multiple strain sensors were used to measure speed from the average, so to a certain extent, estimation speed errors caused by acceleration and deceleration of vehicles will be eliminated. As an added benefit, multiple sensors can also expand the scope of measurements, providing more vehicles feature parameters.
The overlap of vehicle classification feature parameters belonging to different classes suggested the need to use a pattern recognition technique for separating vehicles into different groups. As an application of machine learning the support vector machines (SVMs) multi-class model was used for this purpose. To improve classification accuracy and robustness centralized and distributed fusion schemes based on two popular SVMs multi-class algorithms were used as fusion multiple sensor data.
Comparison of experimental results shows the OAA and OAO methods with distributed fusion strategies are more suitable for practical use. In the paper, only two features are extracted from the pavement strain data and used to train SVM classifier. To improve classification accuracies and robustness, more features (such as vehicle length, axle load etc.) from strain time series to train SVM classifier will be studied.
Source: Cambridge University
Authors: Wenbin Zhang | Qi Wang | Chunguang Suo
>> For More Matlab Projects on Embedded Systems for Final Year Students