ABSTRACT
The control architecture is one of the most important part of agricultural robotics and other robotic systems. Furthermore its importance increases when the system involves a group of heterogeneous robots that should cooperate to achieve a global goal. A new control architecture is introduced in this paper for groups of robots in charge of doing maintenance tasks in agricultural environments.
Some important features such as scalability, code reuse, hardware abstraction and data distribution have been considered in the design of the new architecture. Furthermore, coordination and cooperation among the different elements in the system is allowed in the proposed control system. By integrating a network oriented device server Player, Java Agent Development Framework (JADE) and High Level Architecture (HLA), the previous concepts have been considered in the new architecture presented in this paper.
HLA can be considered the most important part because it not only allows the data distribution and implicit communication among the parts of the system but also allows to simultaneously operate with simulated and real entities, thus allowing the use of hybrid systems in the development of applications.
DESIGN OF THE AGRITURE ARCHITECURE
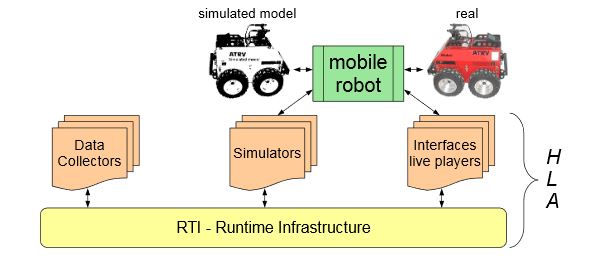
Figure 2. HLA offers the possibility to employ real and simulated entities at the same time
It allows the use of both real and simulated entities at the same time, being these entities robots, environments, or any part of the system able to be simulated. This is specially useful when the system is optimized for a specific application, like the case of agricultural robotics. The relationship among the different parts is depicted in Figure 2.
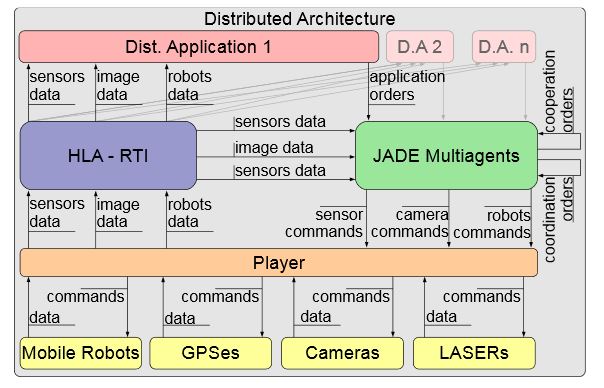
Figure 4. Flow chart
The diagram shown in Figure 4 represents how the signals flow in the proposed architecture. In this chart, an instance of device (Camera, LASER, GPS or Robot) is directly linked to a real or a simulated element.
IMPLEMENTATION OF THE AGRITURE ARCHITECTURE

Figure 6. Rescuer robotic system
It is a mobile platform extremely solid and very appropriate for outdoor environments, even hazardous to access (see Figure 6). It is appropriate for scientific research. The researchers can add components (cameras, sensors, hydraulic arms or grippers) due to its modular system. A big quantity of equipment can be added whether over its platform or inside it.
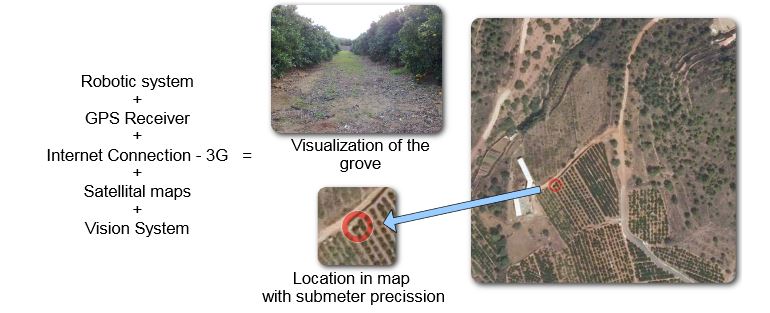
Figure 12. Example of the visual data collected by all the sensors
With all the “sensors” previously listed, a global view of the real environment can be obtained. On the one hand, the vision system and LASER provide local information related to the real environment in real time. On the other hand, the GPS module sends the coordinates to a maps service via Internet (WiFi router with 3G connection) that allows the robot to obtain the image of the area where it is placed. A graphical description is shown in Figure 12.
POSSIBLE DISTRIBUTED APPLICATIONS OF AGRITURE
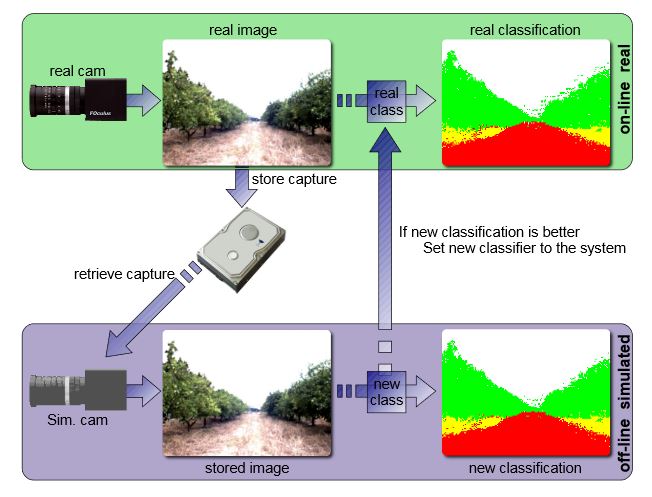
Figure 13. Offline application: HLA allows to simulate all the elements to optimize part of the system
As an example, this system can be run in a real orange where a classifier processes the images obtained by the vision system in order to identify the elements of the grove as depicted in Figure 13. The sequence of images captured can be stored for further research or debugging tasks. Although the classifier used can be good enough, its performance can be improved by setting better its parameters.

Figure 15. Application 2: HLA offers the possibility to virtualize an element/device of a real robot
The second hybrid application considered is depicted in Figure 15. This application consists in using both real and virtual devices in a real environment (orange grove). In this system, a real robot could perform a virtual task in parallel with other real tasks. For instance, the orange trees can be virtually sprayed or the weeds located in the path can be virtually removed while the robot is navigating through the grove. In this way, some different algorithms to perform a new task can be tested while the robot is running another real application.
CONCLUSIONS
In this paper, Agriture, a new architecture to implement an agricultural multirobotic system has been introduced. In Agriture, Player/Stage is in charge of the hardware (real or simulated) abstraction. The coordination and cooperation tasks rely on JADE whereas the implicit communication is assigned to HLA. They have been selected to improve the reusability, scalability and interoperability of system.
Furthermore, the use of Agriture has been introduced either in real or simulated environments. It can be used in real applications or it can be applied to simulate experiments. In addition, the proposed architecture can be used in hybrid systems in which real and simulated elements (devices and environments) can interact.
Source: University of Valencia
Authors: Patricio Nebot | Joaquin Torres-Sospedra | Rafael J. Martinez