ABSTRACT
One of the most important parts of an autonomous robot is to establish the path by which it should navigate in order to successfully achieve its goals. In the case of agricultural robotics, a procedure that determines this desired path can be useful. In this paper, a new virtual sensor is introduced in order to classify the elements of an orange grove. This proposed sensor will be based on a color CCD camera with auto iris lens which is in charge of doing the captures of the real environment and an ensemble of neural networks which processes the capture and differentiates each element of the image.
Then, the Hough’s transform and other operations will be applied in order to extract the desired path from the classification performed by the virtual sensory system. With this approach, the robotic system can correct its deviation with respect to the desired path. The results show that the sensory system properly classifies the elements of the grove and can set trajectory of the robot.
DETAILS OF THE SENSORY SYSTEM

Figure 1. Image captured at an orange grove placed in Castell on (Spain)
The vision system considered for the application introduced in this paper is based on a color camera with VGA resolution. Some experiments were successfully performed using a normal camera with these features. In Figure 1, three different captures are shown.
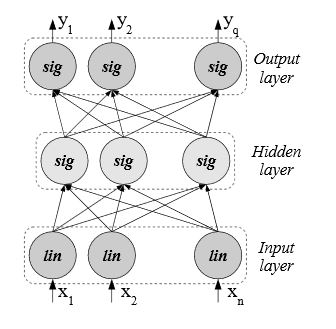
Figure 2. Multilayer feed forward Network
The network architecture used in the experiments performed in this paper is the Multilayer Feedforward Network, henceforth called MF network. This network consists of three layers of computational units as it can be seen in Figure 2. The neurons of the first layer apply the identity function whereas the neurons of the second and third layers apply the sigmoid function.
PATH PLANNER FOR NAVIGATION IN ORANGE GROVES
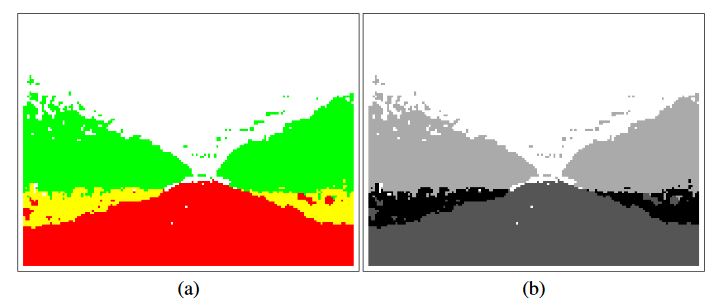
Figure 3. Classification image in color and gray scale representations
For this application, path planning, the gray scale representation has been selected for classification images because some specific image processing algorithms that have been applied requires this kind of images. Furthermore, the four gray colors shown in Figure 3 have been selected in order to maximize the contrast between classes and improve the performance of the whole system.
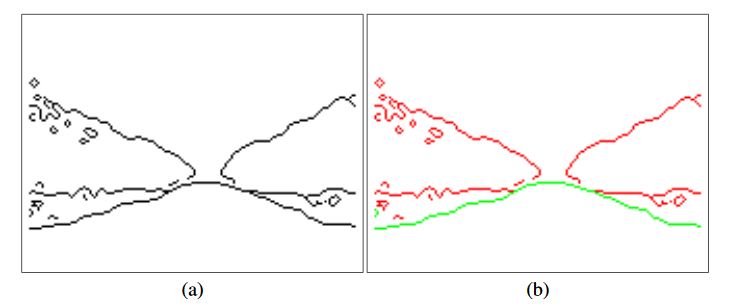
Figure 5. Borders (boundaries lines) between classes of the classification image
Figure 5(a) shows the borders obtained after applying “canny”. At first sight, the five representative lines which represent the borders between classes can be seen. Among these five lines, only two of them (highlighted in green in Figure 5(b)) have to be extracted. These two lines represent the boundaries between Soil/Land and the orange trees. Although the other lines (highlighted in red in (b)) are also important they are not used at this stage of the system.
EXPERIMENTAL SETUP AND RESULTS
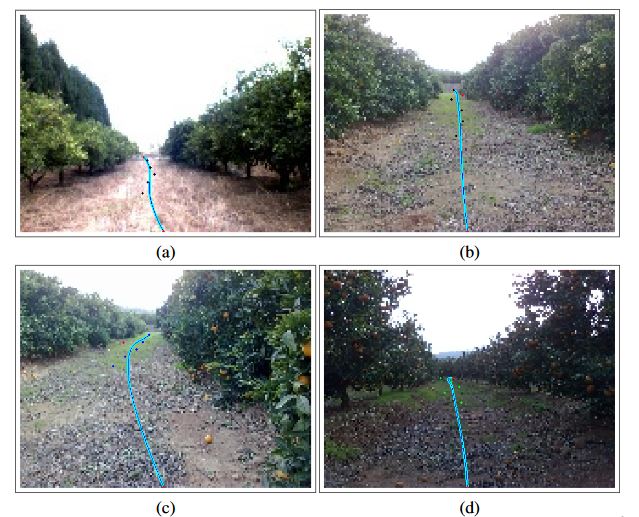
Figure 15. Some results and the calculated trajectories
Then, Figure 15 shows four captures with the desired path (by which the robot should navigate) drawn on it. These images were taken in different groves with different environmental (lighting and weather) and positional conditions.
CONCLUSIONS
In this paper, a new sensory system based in a color CCD camera with auto iris control and a Simple Ensemble of neural networks has been introduced. This new system is introduced to capture images from an orange grove and provide the classification of the elements it contains. With the classification image, some representative lines are extracted with the Hough transform and the center of the path is established with them.
This procedure is applied to the whole image and in five representative subareas of the capture. With these lines, calculated in general and for the five subareas, the final trajectory is set with a Bezier curve of 6th degree. The results shown in this paper are promising. The desired path is properly calculated in different lighting conditions. The desired path is calculated with the classification provided by Simple Ensemble. This classifier provides nearly 95% of correctly classified patterns.
Moreover, the determination of the center of the path in some subareas has had a positive effect in those groves whose structure is not linear because the center of the path is also properly obtained. Finally, some further work will be focused on optimizing the classification system. Although the performance of Simple Ensemble is high, some well-known ensembles such as Bagging, Boosting and Cross-Validation Committee will be tested on this concrete application. The best ones will be applied to improve the performance of the classifier as suggested for an heterogeneous set of classification problems.
Source: Oxford University
Authors: Joaquin Torres-Sospedra | Patricio Nebot