ABSTRACT
Collision avoidance is an important feature in advanced driver-assistance systems, aimed at providing correct, timely and reliable warnings before an imminent collision (with objects, vehicles, pedestrians, etc.). The obstacle recognition library is designed and implemented to address the design and evaluation of obstacle detection in a transportation cyber-physical system. The library is integrated into a co-simulation framework that is supported on the interaction between SCANeR software and Matlab/Simulink.
From the best of the authors knowledge, two main contributions are reported in this paper. Firstly, the modelling and simulation of virtual on-chip light detection and ranging sensors in a cyber-physical system, for traffic scenarios, is presented. The cyber-physical system is designed and implemented in SCANeR. Secondly, three specific artificial intelligence-based methods for obstacle recognition libraries are also designed and applied using a sensory information database provided by SCANeR.
The computational library has three methods for obstacle detection: a multi-layer perceptron neural network, a self-organization map and a support vector machine. Finally, a comparison among these methods under different weather conditions is presented, with very promising results in terms of accuracy. The best results are achieved using the multi-layer perceptron in sunny and foggy conditions, the support vector machine in rainy conditions and the self-organized map in snowy conditions.
CPS CO-SIMULATION FRAMEWORK DESCRIPTION
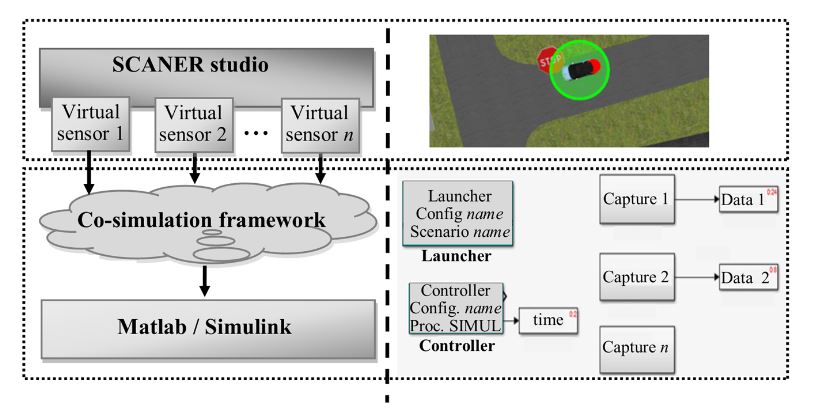
Figure 2. Co-simulation framework architecture
A two-module co-simulation system is introduced in this work. The first module is used to generate multiple 3D traffic scenarios composed by different nodes that belong to a sensor network, using SCANNER. The second module with three specific artificial intelligence-based methods (i.e., artificial neural network, self-organized map and support vector machine) is implemented in Matlab/Simulink.
A classifier is then derived from data cloud points given by virtual sensors in the CPS (Figure 2). Matlab/Simulink can easily interact with SCANeR studio, even in real time, thought a software development kit (SDK) module. The main goal of the classifier system is the detection of multiple obstacles in traffic scenarios.
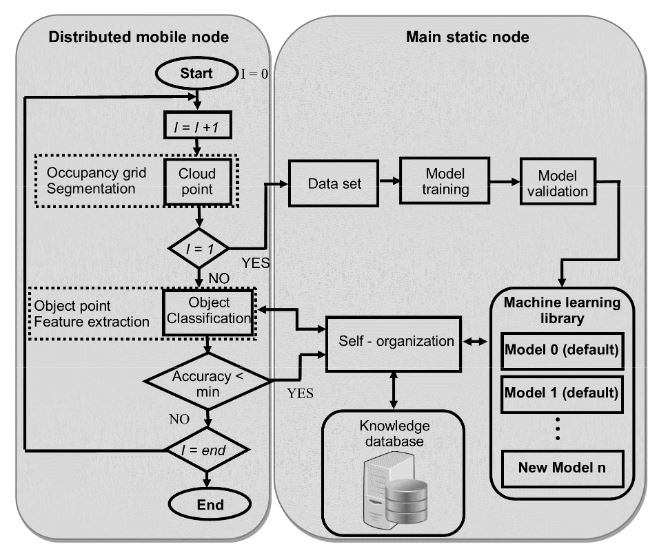
Figure 4. Block diagram of classification methodology procedure for object-type identification
The flow diagram of the procedure is shown in figure 4. The distributed mobile node is also composed by the “cloud point” block that includes the occupancy grid generation and segmentation of ground plane and nearby obstacles. These nodes also include the classification block for object point detection and feature extraction.
CASE STUDY WITH A SENSOR NETWORK IN CPS FOR DRIVING ASSISTANCE: LIDAR ON-CHIP AND GPS SENSORS
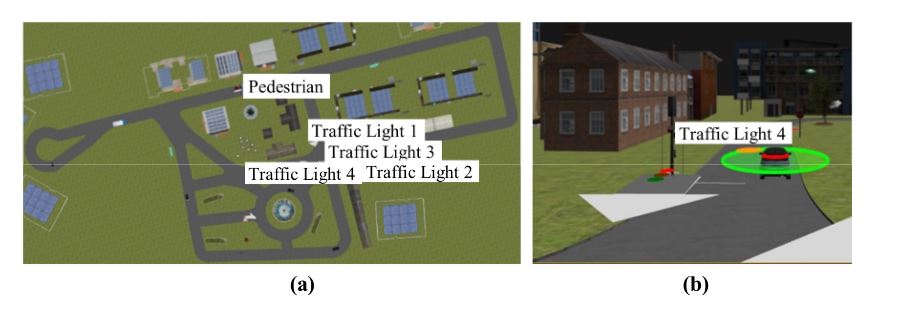
Figure 5. (a) Aerial view of simulation scenario of the CPS; (b) A fully automated vehicle model
Once the CPS is defined, the next step is to define the object type to be identified in this particular simulation scenario. The virtual sensors mentioned earlier are incorporated in all vehicle models included in this scenario (Figure 5b), and can find different kinds of static and dynamic objects as obstacles—trees, traffic signs, traffic lights, vehicles, motorcycles and pedestrians—viewed from different directions and distances. For the sake of clarity, among common patterns in a real driving-assistance scenario, such as roads, lane markings, traffic signals, vehicles, pedestrians, and so on, only pedestrians were considered in this case study.
Figure 7 shows the classifiers outputs of the three models vs observed classes using the validation set. The output of the classifiers is whether the detected object is a pedestrian (class 1) or not (class 0). The three classifiers showed very good performance indices, although the smallest error and the highest number of correctly classified instances corresponded to MLP, followed by SVM, and finally, the worse result corresponded to SOM. This study is not conclusive, and therefore, validation with an unknown data set is required (using more performance indices) in order to make a more complete comparative study among the three classifiers.
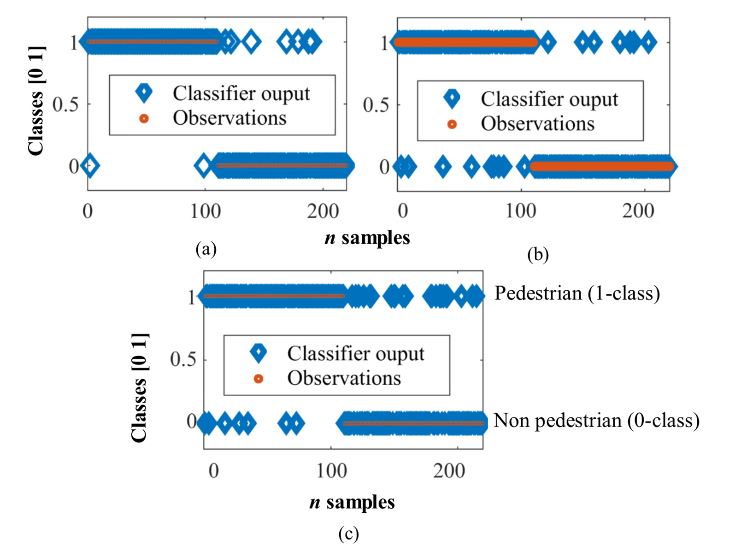
Figure 7. Validation results in pedestrian detection. (a) MLP; (b) SVM and (c) SOM
EXPERIMENTAL RESULTS WITH OTHER WEATHER CONDITIONS
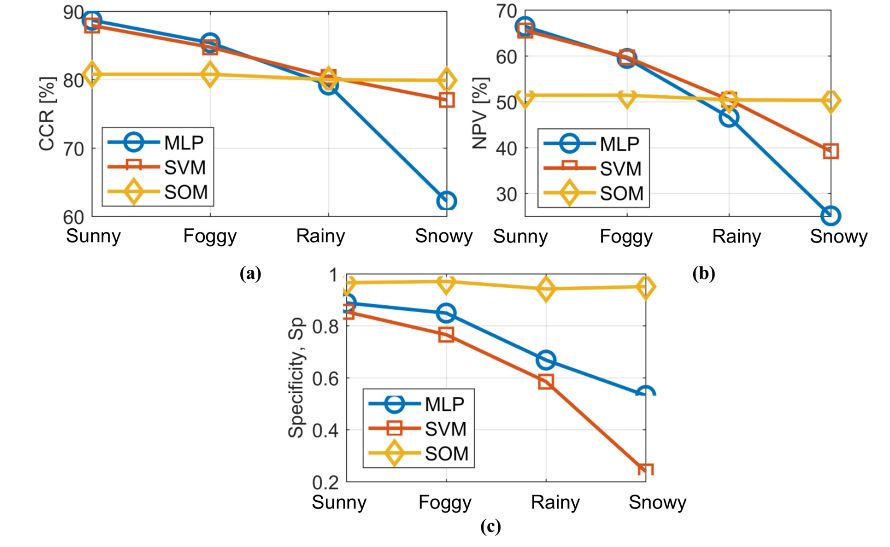
Figure 8. Behaviour of the performance indices for each classifier with regard to weather conditions
The latter two remain more stable in spite of the weather conditions. In fact, SOM outperforms other topologies in the most extreme weather condition (snowy) with the highest specificity value (Sp). On the other hand, SVM produces the best classification in rainy conditions, although in sunny and foggy conditions, the results are worse than those given by MLP. Figure 8 depicts the behaviour of CCR, PPV and Sp of the three classifiers with regard to the four weather conditions.
CONCLUSIONS
This work presents a library of artificial intelligence-based methods for obstacle detection. The library is composed by three methods: a multi-layer perceptron neural network, a self-organizing map and a support vector machine. The library is integrated into a co-simulation framework for obstacle recognition on the basis of sensory data provided by a virtual sensor network in a cyber-physical system.
This co-simulation framework is designed and built using SCANeR studio and Matlab/Simulink. Moreover, an assistance-driving scenario is created in SCANeR in order to represent and emulate the behaviour of a cyber-physical system. The whole system is evaluated in a particular use case built from two types of sensory data (LiDAR on-chip and GPS sensors) within a defined scenario.
The comparative study demonstrates that the proposed obstacle detection methods are powerful strategies for pedestrian detection. In the training and validation phase of the classification models, the best results were achieved with the multi-layer perceptron and the support vector machine, but the self-organizing map did not perform so badly as to be discarded from future analyses.
Source: Technical University
Authors: Fernando Castano | Gerardo Beruvides | Rodolfo E. Haber | Antonio Artunedo
>> Artificial Intelligence Projects using Matlab for Final Year Students