ABSTRACT
Cooperation among devices with different sensing, computing and communication capabilities provides interesting possibilities in a growing number of problems and applications including domotics (domestic robotics), environmental monitoring or intelligent cities, among others. Despite the increasing interest in academic and industrial communities, experimental tools for evaluation and comparison of cooperative algorithms for such heterogeneous technologies are still very scarce.
This paper presents a remote testbed with mobile robots and Wireless Sensor Networks (WSN) equipped with a set of low-cost off-the-shelf sensors, commonly used in cooperative perception research and applications, that present high degree of heterogeneity in their technology, sensed magnitudes, features, output bandwidth, interfaces and power consumption, among others. Its open and modular architecture allows tight integration and interoperability between mobile robots and WSN through a bidirectional protocol that enables full interaction.
Moreover, the integration of standard tools and interfaces increases usability, allowing an easy extension to new hardware and software components and the reuse of code. Different levels of decentralization are considered, supporting from totally distributed to centralized approaches. Developed for the EU-funded Cooperating Objects Network of Excellence (CONET) and currently available at the School of Engineering of Seville (Spain), the testbed provides full remote control through the Internet. Numerous experiments have been performed, some of which are described in the paper.
RELATED WORK
The testbed presented in this paper has been developed to address a twofold objective. From a scientific viewpoint, it can be used as a tool to compare approaches, techniques, functionalities and algorithms in the same conditions. From an application point of view, it can be used as an intermediate step in the development of techniques before testing in the real application. The same experiment can be repeated many times with different conditions to assess its behavior.
TESTBED DESCRIPTION
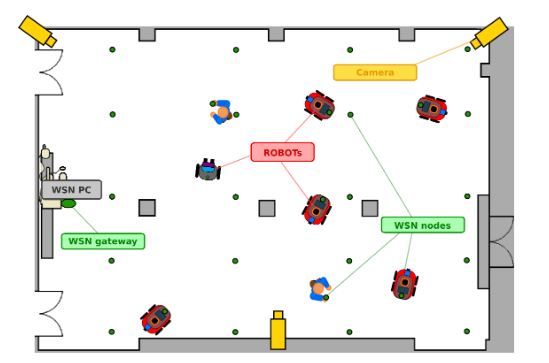
Figure 1. General scheme of the integrated testbed
Figure 1 shows the basic deployment of the testbed. It is set in a room of more than 500 m2 (22 m × 24 m) crossed longitudinally by three columns. Two doors lead to a symmetrical room to be used in case extra space is needed. The figure shows the mobile robots and WSN nodes (green dots), that can be static or mobile, mounted on the robots or carried by people.
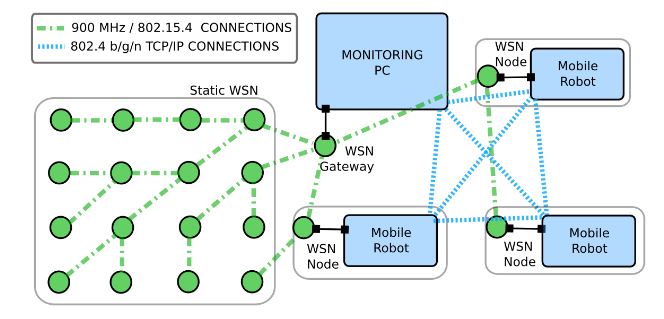
Figure 4. Connections among the testbed elements
Figure 4 shows all the data connections among the testbed elements. There are two wireless networks: a wireless LAN (802.11b/g/a) that links the PC that monitors the WSN (WSN-PC) and the team of robots (represented with dashed blue lines in the figure) and the ad-hoc network used by the WSN nodes (represented with green lines while nodes are circles).
SOFTWARE ARCHITECTURE
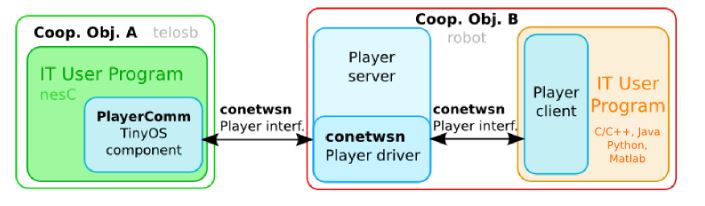
Figure 6. Scheme for interoperability in the testbed architecture. The testbed infrastructure (blue) abstracts hardware and interoperability specificities
Also, a TinyOS component was developed to facilitate programs development providing a transparent API compliant with this protocol. The component was validated with Crossbow TelosB, Iris, MicaZ, Mica nodes. Other WSN nodes could be easily integrated following this interface. Figure 6 shows a diagram of the interoperability modules developed.
USERS SUPPORT INFRASTRUCTURE
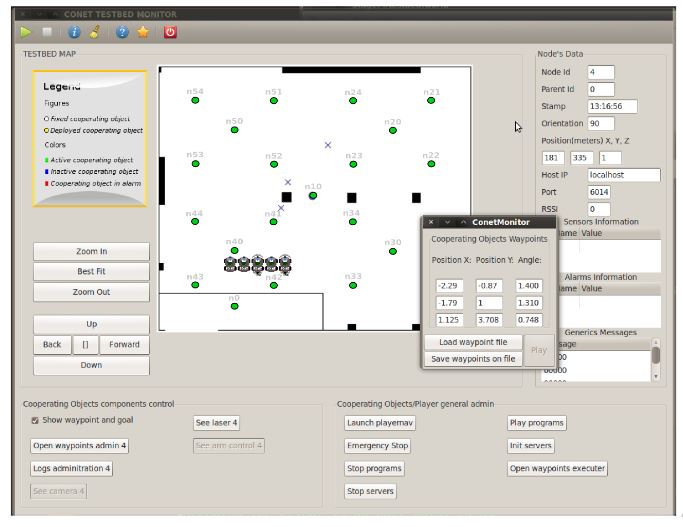
Figure 7. Snapshot of the testbed GUI for remote experiment control and monitoring
For instance, the robot trajectory following functionality can be configured by simply providing a list of way points. The way points can be given by manually writing the coordinates in the dialog box, see Figure 7, or by a simple text file. Moreover, the user can graphically, by clicking on the GUI window, define the robot way points. Also, if the user does not want to use the basic functionalities, the GUI allows to on-line upload user executable codes for each platform.
EXPERIMENTS
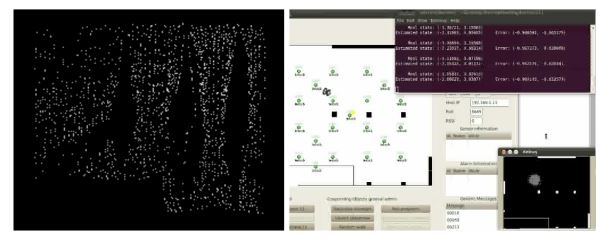
Figure 8. (Left) RSSI raw measurements map for node n20 ; (Right) Snapshot showing the particles estimated location and real robot location during a remote experiment
The static nodes receive the messages and respond. The RSSI from each static node is measured and registered. Figure 8 left shows the RSSI raw measurements corresponding to node n20, located at the right top of the testbed room. Brighter colors represent higher radio strength. With these measurements RSSI maps are generated and later, they are used for localization. The robot measures RSSI from the static nodes and estimates its location using a Particle Filter (PF) taking into account the similarities with the RSSI map. The robot estimated location is computed as the weighted average of the PF particles.
CONCLUSIONS
Cooperation between sensors and platforms with heterogeneous capabilities is attracting great interest in academic and industrial communities due to its high possibilities in a large variety of problems. However, the number of experimental platforms for evaluation and comparison of cooperative algorithms remains still low for an adequate development of these technologies. This paper presents a remote testbed for cooperative experiments involving mobile robots and Wireless Sensor Networks (WSN).
Robots and WSN have very diverse capabilities. Although making them interoperable is not easy, this diversity is often the origin of interesting synergies. The testbed is currently available and is deployed in a 500 m2 room at the building of the School of Engineering of Seville. It comprises 5 Pioneer 3AT mobile robots and one RC-adapted robot and 4 sets of different WSN nodes models, which can be static or mobile, mounted on the robots or carried by people.
These platforms are equipped with the sensors most frequently used in cooperative perception experiments including static and mobile cameras, laser range finders, GPS receivers, accelerometers, temperature sensors, light intensity sensors, among others. The testbed provides tight integration and full interoperability between robots and WSN through a bidirectional protocol with data, request and command messages. The testbed is open at several levels. It is not focused on any specific application, problem or technology.
It can perform only WSN, only multi-robot or robot-WSN cooperative experiments. Also, its modular architecture uses standard tools and abstract interfaces. It allows performing experiments with different levels of decentralization. As a result, the proposed testbed can hold a very wide range of experiments. It can also be remotely operated through a friendly GUI with full control over the experiment.
It also includes basic functionalities to help users in the development of their experiments. The presented testbed has been used in the EU-funded Cooperating Object Network of Excellence CONET to assess techniques from academic and industrial communities. The main experiments already carried out focused on cooperative tracking using different sets of sensors, data fusion, active perception, cooperative exploration and robot-WSN collaboration for network diagnosis and repairing.
Source: University of Sevilla
Authors: Adrian Jimenez-Gonzalez | Jose Ramiro Martinez-De Dios | Anibal Ollero
>> More Wireless Sensor Networks Projects Abstract for Final Year Students