ABSTRACT
The use of renewable energy resources has created some problems for power systems. One of the most important of these is load frequency control (LFC). In this study, in order to solve the LFC problem, modern control methods were applied to a two area multi source interconnected power system. A photovoltaic solar power plant (PV-SPP) was also connected, in order to identify the harmful effects on the frequency of the system.
A new Genetic-based Fuzzy Logic (GA-FL) controller was designed to control the frequency of the system. For comparison, conventional proportional-integral-derivative (PID), fuzzy logic (FL), and Genetic Algorithm (GA)-PID controllers were also designed. The new control method exhibited a better performance than the conventional and other modern control methods, because of the low overshoot and short settling time. All simulations were realized with the Matlab-Simulink program.
MATERIALS AND METHODS
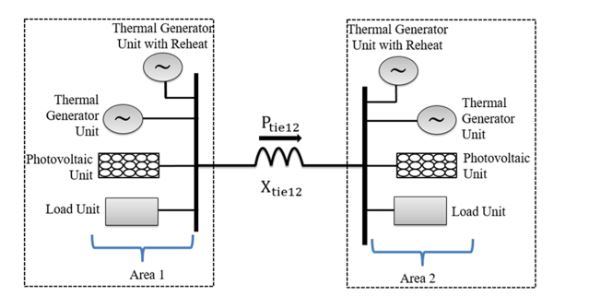
Figure 1. A two area three source interconnected system block diagram
In this study, a two area three source interconnected renewable energy power system was modelled, which is shown in Figure 1. A thermal unit (TU), a thermal generator unit with a reheat unit (RTU), and a PV-SPP were connected to the system as energy resources. The TUs and the RTUs were practically employed in some literature for the LFC. Since the use of PV-SPPs in grids has gradually increased in the last few years, a PV-SPP was incorporated into the system.
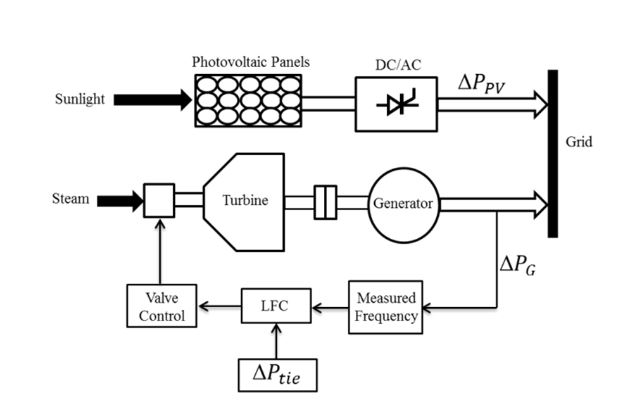
Figure 4. A LFC applied a single area interconnected power system
The blocks used in a single area interconnected power system are generally nonlinear systems. The loads at the operating point and the PV-SPP affect the frequency of the system. A LFC applied to a single area interconnected power system, which is shown in Figure 4, has a turbine, a generator, and other system blocks. Additionally, a PV plant generated through sunlight is demonstrated. For the system, a control responds as quickly as possible.
RESULTS AND DISCUSSION
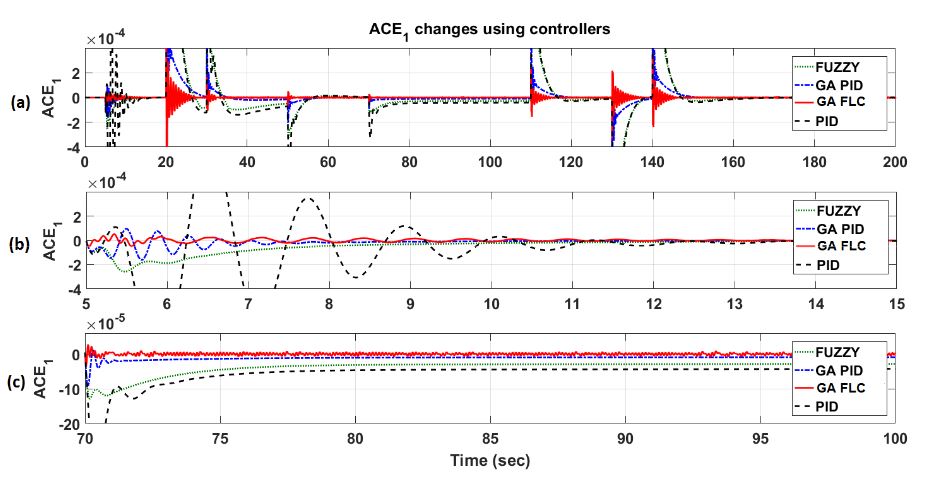
Figure 16. Changes of ACE 1 in the area 1: (a) during all simulation time; (b) 5th change; (c) 70th change
The modeled system has been operated for 200s. The changes of ACE1 for area 1 are shown in Figure 16. In Figure 16b, the effect of increasing the demand power in area 2 on the frequency in area 1, is demonstrated. According to the results obtained from the four different controllers, the GA-FLC demonstrates a better performance than the others, in terms of the sudden oscillations. Additively, Figure 16c illustrates the effect of a long-term power drop of the solar power plant due to climatic conditions on the ACE1 value.
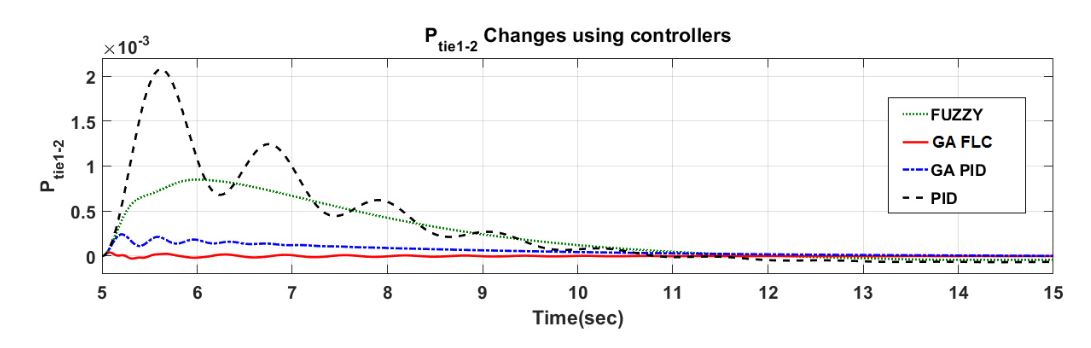
Figure 23. The power change over the connection line between area 1 and area 2
The power change over the connection line between area 1 and area 2 is shown in Figure 23. As shown in Figure 23 and Table 6, the frequency deviation in the second area is minimized. When the situation at the 5th s is examined, the settling time value of the GA-FLC is set to 5.5 s, GA-PID is set to 5.9 s, FL is set to 8.3 s, and PID is set to 9.6 s.
CONCLUSIONS
In this paper, a new GA-FLC controller was proposed for frequency stability problems in a two area multi source interconnected power system. The power system to be controlled was consisted of a thermal, a reheated thermal, and a PV unit. In addition to the proposed controller, conventional PID, FL, and GA-based PID controllers were designed. All systems and controllers were designed and simulated with the Matlab-Simulink program.
In the simulations, a change in the frequencies and the tie-line power were observed by implementing each controller. Since there was a two-area power system and they were connected by a tie-line, the outputs of ∆F1, ∆F2, and ∆P tie of the system were individually plotted. As can be seen from the data in Table 6, the proposed controller produces better results than the other controllers, both in terms of overshoot and settling time values. These values were taken during the load increase and the solar power decrease periods.
Therefore, this demonstrates the reaction of the system at the moment of operation and a more realistic simulation was realized. The proposed GA-FLC has three membership functions with an optimized GA, and twenty-five rules. Owing to the proposed controller, the system frequency is affected at a minimum rate when the power changes on the PV-SPP because of climatic conditions. Moreover, the ability of the system to adapt to sudden power fluctuations at the operation point was also improved. In the meantime, the optimum values of the Kp, Ki, and Kd parameters for the PID controller were determined by the Zigler-Nichols method.
Source: Kirikkale University
Authors: Ertugrul Cam | Goksu Gorel | Hayati Mamur
>> 200+ Matlab Projects for Control System for Final Year Students