ABSTRACT:
This thesis-project aims to research the possibilities of new wireless technologies in general control-situations. We have studied different existing control protocols, and developed a new protocol focusing on textbased menus.
Our protocol is scaleable, easy to implement, and platform- and media independent. Since our protocol supports Plug and Play with dynamically allocated id’s, it does not require a unique id in the hardware.
To test the protocol we have developed a prototype system, consisting of a mobile phone connected to a server, which in turn is connected to two slave units, controlling peripheral equipment on 220 Volt.
The phone is an Ericsson T28, equipped with a Bluetooth unit. The server is running the real-time OS eCos on an ARM 7TDMI Evaluation Kit, and the slave units consist of two developer boards equipped with PIC-processors.
Communication between the phone and the server is done over Bluetooth. However we did not find a working Bluetooth protocol stack ported to eCos, so a serial cable was used instead. Communication between the server and the slaves is done over a RS-485 serial network which simulates the traffic over a radio-network. The results show that our protocol is working, and that our system would be easy to implement, cheap to produce and very scalable.
OVERVIEW OF EXISTING INTERESTING TECHNIQUES
We have looked at different new technologies that could be used in our system. We have considered Bluetooth, RF (Radio Frequency), IEEE-1394 (FireWire), Infra red, “WaveLAN” IEEE-802.11b and HomeRF. We decided to use Bluetooth between the mobile phone and the server, because it is available in many new mobile phones, and it is also power efficient. Between the server and the slave units we choose to use RF, because it is power efficient, and the transceivers are cheap, in contradiction to the Bluetooth transceivers.
X10:
X105 is a pure home automation protocol developed in the late 70’s by the Scottish company Pico Electronics. Their patent expired in 1997, and the X10 protocol is now an open standard. The protocol is limited, but simple, and uses the existing electrical cables to transmit signals between devices. X10 is mostly used in America on their 110V-system, but there are also devices for the 220V-system to a lesser extent.
JINI:
JINI7 is an open network technology for assembling services (devices, databases and applications) and clients. Built on Java, its main focus is to create large, reliable networks out of unreliable parts where system administration is minimised.
S.N.A.P– Scaleable Node Address Protocol:
SNAP is a protocol developed in 1998-2002 by the Swedish company High Tech Horizon. It is a flexible control-protocol for many different applications. Its main
features are:
- Easy to implement on any platform, and in any language.
- Scaleable.
- 8 different error-detecting methods (Checksum, FEC etc.).
- Can be used in master/slave and/or peer-to-peer.
- Media independent.
HAVi:
HAVi10 (Home Audio Video Interoperability) is a set of platform-independent APIs
intended mostly to be used by home audio and video products. The standard depend upon IEEE-1394 (FireWire, iLink), as a medium, so it is not only for controlling, and for Plug and Play, but also for transmitting the audio and video data itself between devices, which is something we do not intend to use.
LonTalk:
LonTalk11 is a protocol specified by the California based company Echelon12 for operating a LON – Local Operating Network. Central in a LON is an integrated circuit called NeuronChip, which is manufactured to Echelons specifications, and sold by Motorola and Toshiba. The LonTalk Networks are intended for applications spanning home and building automation, plus factory automation and aircraft. A LON network is intended for device control over many different types of media and does not support the distribution of audio or video data.
HARDWARE AND PLATFORMS
To implement our protocol we developed a master/slave system controlled by a mobile phone. The system is shown in Figure 4-1 below. From left to right we see a slave unit with LCD-display connected via an RS485-network (white in the picture) to another slave unit (below the white), which in turn is connected to the server. Connected via a serial cable to the server is an Ericsson T28 mobile phone.
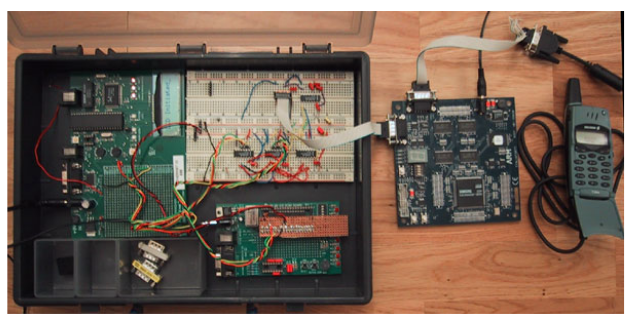
Overview Over the Hardware of the Complete System.
SOFTWARE DESIGN
From the criteria in the introduction we developed a set of more concrete needs of the software. First of all we wanted to let the units supply the menus themselves, to gain platform independence, ease of use and expandability. With this idea we would be able to actually plug in a cluster of mp3-players with 10 levels of submenus, or we could just connect a thermometer where one of the menus is the temperature, which is read by the RDServer continuously. We wanted the user to navigate through text-menus to make it easy to understand.
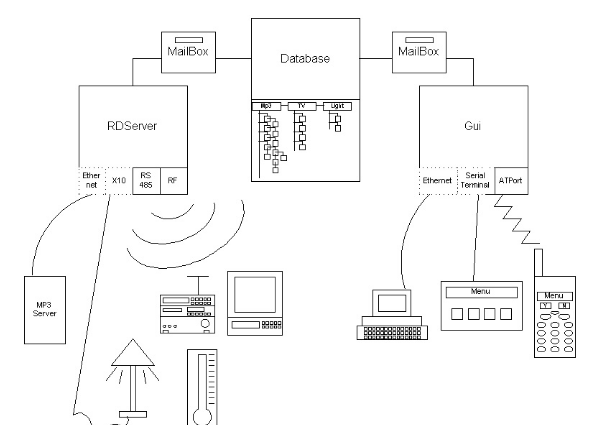
Overview of the Implementation.
RESULT
To implement and test our protocol, we have built a prototype system with an ARM- processor, Ericsson T28, a PIC-processor with a LCD-display, and a PIC-processor with LEDs mounted on the card. Between the slaves and the server we wanted to use serial communication over radio, but this was a later question, so we simulated a radio-network by using RS-485.
Source: Linkopings University
Authors: Per-Ola Gustafsson | Marcus Ohlsson
>> More Wireless Bluetooth Projects for Engineering Students
>> More Wireless Engineering Projects for Beginners