ABSTRACT
In this study, the modified Cramer-Rao lower bounds (MCRLBs) on the joint estimation of target position and velocity is investigated for a universal mobile telecommunication system (UMTS)-based passive multistatic radar system with antenna arrays. First, we analyze the log-likelihood redfunction of the received signal for a complex Gaussian extended target.
Then, due to the non-deterministic transmitted data symbols, the analytically closed-form expressions of the MCRLBs on the Cartesian coordinates of target position and velocity are derived for a multistatic radar system with Nt UMTS-based transmit station of Lt antenna elements and Nr receive stations of Lr antenna elements. With the aid of numerical simulations, it is shown that increasing the number of receiving elements in each receive station can reduce the estimation errors.
In addition, it is demonstrated that the MCRLB is not only a function of signal-to-noise ratio (SNR), the number of receiving antenna elements and the properties of the transmitted UMTS signals, but also a function of the relative geometric configuration between the target and the multistatic radar system. The analytical expressions for MCRLB will open up a new dimension for passive multistatic radar system by aiding the optimal placement of receive stations to improve the target parameter estimation performance.
SIGNAL MODEL
Let us consider a passive multistatic radar system with Nt widely spaced transmit stations and Nr widely spaced receive stations. Each transmit and receive station consists of Lt and Lr antenna elements respectively. Here, the receive stations can receive echoes from the target due to the UMTS signals scattered off the target as well as the UMTS signals from the transmit stations whose locations are supposed to be known. The UMTS signals are received via two directions: a path which is due to scattering off the target and a direct path.
MAXIMUM LIKELIHOOD ESTIMATION
Under Assumptions 1 and 2, and suppose that the noise and the target reflection coefficients are mutually independent, the joint probability density function (PDF) of the received signals r(t) for a given transmitted symbol vector c. In the first-order Keystone transform and the Lv’s transform are utilized to estimate the multiple targets motion parameters, which is fast and can obtain the accurate parameter estimation without knowing the number of targets and their motion information. Future work will develop some other suboptimal approaches to reduce complexity.
DERIVATION OF MODIFIED CRAMER-RAO LOWER BOUND
In this section, we will derive the MCRLB for jointly estimating the target position (x, y) and velocity (vx, vy) for a multistatic radar system with Nt UMTS-based transmit station of Lt antenna elements and Nr receive stations of Lr antenna elements. Generally speaking, the CRLB is a good prediction of the variance of the estimation error due to the fact that the CRLB is close to the MSE of the MLE when SNR is large or the number of taken data samples is large.
NUMERICAL SIMULATIONS AND PERFORMANCE ANALYSIS
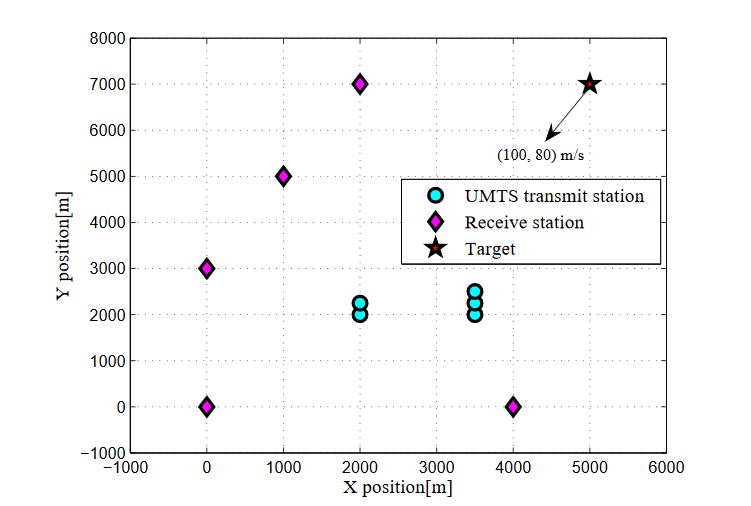
Figure 1. Simulated multistatic 2D scenario with locations of transmit stations, receive stations and target
For numerical simulations, we assume a multistatic radar system with five UMTS-based transmit station and an equal number of receive stations, i.e., Nt = 5 and Nr = 5. The Cartesian coordinates of the positions of transmit stations (in m) are given in Table 1. The positions and moving parameters of the receive stations are provided in Table 2. Consider a target moving with velocity [100, 80] m/s is located at [5000, 7000] m. For a brief discussion, we consider a scenario in a 2D geometry as visualized in Figure 1.
CONCLUSIONS
This paper investigates the performance of joint target position and velocity estimation employing a passive UMTS-based multistatic radar system with antenna arrays. A received signal model is developed for a multistatic radar configuration with Nt transmit station of Lt antenna elements and Nr receive stations of Lr antenna elements. The ML estimate and the MCRLB are calculated under the signal model assumptions. The derived closed-form expressions for MCRLB can be utilized to bound the target parameter estimation performance for different scenarios including a variety of radar system architectures.
To provide insight, the further theoretical and numerical results are presented to demonstrate that the MCRLB not only depends on the geometry between the target and the passive multistaitc radar configuration but also depends on the SNR value and the transmitted UMTS signal parameters such as the number of symbols and symbol time. It is also shown that the joint target estimation performance of the passive multistatic radar system can be remarkably enhanced with the increase of the number of receiving elements in each receive station.
In future work, we will use this framework to study the target estimation performance of other illuminators of opportunity in addition to UMTS signals. Further, we will extend this research to the multiple-target case by appending the parameters corresponding to multiple targets into the unknown target state vector. Also, we will develop mathematical relations to obtain the optimal placement of receive stations for improving the estimation performance with arbitrary waveforms and multiple targets.
Source: Nanjing University
Authors: Chenguang Shi | Fei Wang | Sana Salous | Jianjiang Zhou