ABSTRACT:
This dissertation present contributions to the understanding of the causes of a side-sweep accidents on multi-lane highways using computer simulation. Side-sweep accidents are one of the major causes of loss of life and property damage on highways. This type of accident is caused by a driver initiating a lane change while another vehicle is blocking the road in the target lane.
Our objective in the research described in this dissertation was to understand and simulate the different factors which affect the likelihood of side sweep accidents. For instance, we know that blind spots, parts of the road that are not visible to the driver directly or through the rear-view mirrors are often a contributing factor. Similarly, the frequency with which a driver checks his rear-view mirrors before initiating the lane change affects the likelihood of the accident.
We can also have an intuition that side-sweep accidents are more likely if there is a significant difference in the vehicle velocities between the current and the target lanes. There are also factors that can reduce the likelihood of the accident: for instance, the signaling of the lane change by the driver can alert the nearby vehicles about the lane change, and they can change their behaviors to give way to the lane changing vehicle.
The emerging technology of vehicle-to-vehicle communication offers promising new avenues to avoid such collisions by making vehicles communicate the lane change intent and their positions, such that automatic action can be taken to avoid the accident.
While we can have an intuition about whether some factors increase or reduce accident rate, these factors interact with each other in complex ways. The research described in this dissertation developed a highway driving simulator specialized for the accurate simulation of the various factors which contribute to the act of lane change in highway driving. We are modeling the traffic as seen from the lane changing vehicle, including the density, distribution and relative velocity of the vehicles on the target lane.
We are also modeling the geometry of the vehicle, including size, windows, mirrors, and blind spots. Moving to the human factors of the simulation, we are modeling the behavior of the driver with regards to the times of checking the mirrors, signalling and making the lane change decision. Finally, we are also modeling communication, both using the traditional way using the turn signals, as well as through means of automated vehicle to vehicle communication.
The detailed modeling of these factors allowed us to perform extensive simulation studies that allow us to study the impact of various factors on the probability of side-sweep accidents. We validated the simulation models by comparing the results with the real-world observations of the National Highway Traffic Safety Administration. One of the benefits of our model is that it allows the modeling of the impact of vehicle to vehicle communication, a technology currently in prototype stage, that cannot be studied in extensive real world scenarios.
LITERATURE REVIEW
This chapter describes much of the related work that has been conducted on side-sweep accidents with respect to blind-spots, and it identifies the pertinent areas that need more research.
Although the literature review is comprehensive in identifying the areas relevant to the side-sweep accidents such as simulator architecture framework, driver lookout statistics, driver awareness about the vicinity, vehicle blind-spot as observed by the driver and technological means of awareness of the blind-spots. But all these research needs are not addressed by this dissertation.
What are the Side Sweep Accidents?
Basically, a side-sweep accident is, when there are two-vehicles travel parallel to each other and because of the blind-spots one driver is unaware of the other while attempting to change the lane.
A blind spot in a vehicle is an area around the vehicle that cannot be directly observed by the driver while in control of the steering wheel, under existing circumstances [LB10, Pla06, JKI00]. Lane changes can occur for a variety of reasons. For example, attempt to overtake the slower vehicle in the front; permit the vehicle approaching faster from behind or simply wants to exit from the highway.
Importance of Reducing Side-Sweep Accidents:
To enhance the vehicle safety factors, it is imperative to study the correlation between the vehicle blind-spots and side-sweep accidents, which account for 4 to 10 percent of crashes according to transportation researchers [FLK09, FKS12, TCE00, WK94]. According to the 2009 National Automotive Sampling System General Estimates System, 7.44% of all car accidents are caused by improper lane changes [FLK09]. Therefore, the best solution is to make aware of the blind-spots with respect to side-sweep accidents, thereby, the driver can make an informed decision before changing the lane.
Importance of Side-Sweep Accident Simulation:
Modeling and simulation comes into play an important role in side-sweep accidents [YQY11, KGN12, QHC13, GW13, KLY12]. Simulation is performed, when conducting experiments on real systems would be impossible or impractical. Furthermore, conducting simulations [SGB05, GWA10 is possible to generate large amount of data with several permutations and combinations with respect to multiple attributes for analytical purposes.
SIMULATION MODEL
Our group at University of Central Florida (UCF) have significant experience in developing traffic simulators to study various aspects of human driving behavior. The UCF Lane Change Simulator (LCS), to be described below, concentrates on modeling in detail the circumstances of a lane changing car in multi-lane highway traffic. In contrast to simulators that model the overall flow of the traffic, the LCS concentrates on a single car and its driver’s decisions as it moves in traffic.
The traffic flowing around the car assumes a Poisson arrival model of the vehicles. Various assumptions about the density and relative velocity of the vehicles in adjacent lanes can be specified as parameters to the simulator. Although photo-realistic visualization is not an objective for LCS, its simple graphical interface allows us to inspect the particular circumstances under which the lane change decision is made.
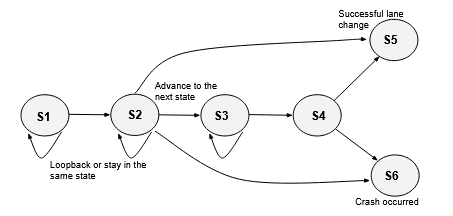
State Transition Diagram.
MODEL OUTPUT AND DATA ACQUISITION
This section includes the several data points and methods of data acquisitions with respect to simulation outputs. The study reviewed the data acquisition methods of lane changing scenarios with respect to frequency, velocity, CPM, spatial dimensions and angle of orientation of BS on side sweep accidents.
At the start of the simulations, the simulator was initialized with default parameters as stated. For example, initially, CPM and BP angles were set to 5 and 5 respectively and the simulations were performed. The simulation was run for 30 seconds; that was the ramp-up period.
DATA ANALYSIS AND RESULTS
In this section, a description of the simulation output results is provided as established in the previous sections. There are several types of simulations being performed to derive the mean averages and then to observe the following results of the model outputs. Model output results are categorized into two areas:
- Simulating the Impact of Blind-Spots on the Frequency of Side-Sweep Accidents.
- The Automobile Blind-Spots’ Spatial Dimensions and Angle of Orientation on Side Sweep Accidents.
- The Impact of the Turning Signal.
Frequency:
Using this simulator, several studies were performed to estimate the time it takes to change a lane and the frequency of side-sweep accidents in various conditions such as traffic density and relative velocity of vehicles and then analyzed the results such as driver wait time, unsuccessful lane changes, number of times the driver stayed back before lane changes.

Correlation Between the Relative Velocity and the Driver Waiting Time Before Changing the Lane.
Angle of Orientation of Side-Sweep Accidents:
This section discusses the impact of the spatial dimensions and angle of orientation of automobile blind spots during side-sweep accidents. Using this simulator, a study was performed to evaluate the correlation between the magnitude and the orientation of the blind spots, the frequency of side-sweep accidents in various conditions (e.g., traffic density and relative velocity) and time to change the lane. All the test scenarios discussed in this section, the left angle size varies from 5 to 25,relative velocity is 1 mph, duration between looks 8 sec, driver lookout frequency probability was set to 0.83
The Impact of the Turning Signal:
In this experiment, we studied the impact of the presence of the turning signal to the success of the lane change. The simulation parameters are described. There are two scenarios are discussed:
- The Impact of the percentage of using the turning signal.
- The impact of the turn signal duration.
Vehicle to Vehicle Communication:
In this set of simulation studies, we consider the case described in Scenario 4, which is a case of V2V communication where the following vehicle communicates its location and velocity to the lane changing vehicle.
CONCLUSIONS
In this research, we presented a simulation model for lane changing vehicles, with a special focus on side-sweep accidents. Simulation modeling analysis can significantly contribute to factors that will enhance driver safety because of side-sweep accidents. In this study, the blind spot simulation model facilitates the what-if analysis of simulating blind spots in the real world by varying initiating conditions of driving scenarios.
This simulation model can take into account many detailed aspects of the lane change processes, such as the vehicle and road geometry, blind spots, driver behavior as well as communication technologies. Through a series of simulation studies, we considered the impact of traditional and novel communication technologies. In traditional communications, it is common sense for an experienced driver to take every precaution in changing lanes safely, but accidents can occur because of blind spots.
We model the traditional way of communicating driver intent through turn signals and the response of the following drivers. We also model modern approaches of V2V communication where the following vehicle notifies the lane changing vehicle of its position and speed, and the automation in the lane changing vehicles overrides the driver’s lane change intent if there is a danger of collision. We found that the existence of V2V communication can largely compensate for driver inattention and large blind spots created by incorrectly adjusted mirrors in the vehicle. In this research, the lane changing scenarios were analyzed with constant vehicle velocity.
FUTURE RESEARCH
In future research, the observations and the results obtained from the simulations pertaining to the scenarios with respect to variable velocities and the impact of the spatial dimensions of the automobile blind spots on the side-sweep accidents will be analyzed. In the following section, we analyzed and produced the results of these scenarios and provided a comparative analysis of the results with respect to traditional and non traditional communication technologies.
Source: University of Central Florida
Author: Gamini Bulumulle
>> Latest Vehicle Automation Projects for Engineering Students